UDSonLIN¶
目标¶
本文档旨在通过一个LIN诊断的示例工程的配置,向用户展示协议栈的集成过程。通过阅读本文档,用户可以了解ORIENTAIS配置工具的配置过程,以及如何应用配置工具生成的配置文件。
为了让用户更清晰的了解工具的使用,所用的配置均逐一手动完成。用户在了解了配置的基本过程后,可以快速完成配置。
缩写词和术语¶
缩写词/术语 |
描述 |
ASW |
Application Software 应用软件 |
BSW |
Basic Software 基础软件 |
MCAL |
Micro Controller Abstraction Layer 微控制器抽象层 |
LINIF |
LIN Interface Module LIN接口模块 |
LINTP |
LIN Transport Layer Module LIN传输模块 |
ComM |
Communication Manager Module 通信管理模块 |
EcuM |
ECU State Manager Module ECU状态管理模块 |
PduR |
PDU Router Module PDU路由器模块 |
Dcm |
Diagnostic Communication Manager 诊断通信模块 |
Dem |
Diagnostic Event Manager 诊断事件管理模块 |
BswM |
Basic Software Mode Manager 基础软件模式管理器 |
Rte |
Runtime Environment 运行时环境 |
iRte |
i-Soft Runtime Environment 普华基础模块运行时环境 |
参考文档¶
[1]参考手册_LinIf.pdf
[2]参考手册_PduR.pdf
[3]参考手册_Dcm.pdf
[4]参考手册_Dem.pdf
[5]参考手册_ UDSonCAN.pdf
协议栈集成¶
项目交付的内容为:协议栈源码和ORIENTAIS Studio配置工具。协议栈细分为协议栈的各模块及其对应的配置工具模块。
协议栈各配置模块的功能介绍,参见表 协议栈各配置模块介绍。
使用协议栈源码和配置工具,进行协议栈的集成的步骤,参见表 协议栈集成的步骤。
模块名 |
功能 |
Lin |
LIN驱动配置。(由EB工具导入,详见章节(Lin模块配置)) |
LinIf |
LinIf模块主要处理上层模块与底层驱动的之间PDU的传递,为上层模块提供统一的接口来管理不同的LIN硬件模块。 |
EcuC |
用于辅助配置工具完成配置的模块。主要提供Pdu的定义,其它模块通过关联EcuC中Pdu,相互关联起来。 |
PduR |
PDU Router主要为相关模块提供基于I-PDU的路由服务。在UDSonLIN栈中,主要是提供LinTP与DCM之间的路由服务。 |
Dcm |
依据ISO15765-3和ISO14229-1标准描述,实现诊断请求报文的解析,响应(正响应和负响应)与执行。 |
Dem |
实现诊断故障的存储与管理功能,提供API接口供其他模块读取DTC和对应的冻结帧数据和扩展数据。 |
步骤 |
操作 |
说明 |
|---|---|---|
1 |
ORIENTAIS Stuido配置工具工程搭建和协议栈模块加载 |
若配置工具已经搭建,则仅需进行协议栈模块的加载操作。 |
2 |
模块配置及配置文件生成 |
NA |
3 |
代码集成 |
现有工程、协议栈源代码和配置生成文件的集成。 |
4 |
验证测试 |
NA |
Note
协议栈集成之前,用户须确保已经有基础工程,且本协议栈相关的其他协议栈能正常工作。
新建ORIENTAIS Stuido配置工程及模块加载¶
安装ORIENTAIS Studio软件后,双击软件图标打开软件。

图 主界面
菜单栏File🡪New🡪Project,新建工程。

图 新建工程
在弹出的新建窗口中选择Autosar下的 [BSW Project],选择Next。

图 新建工程
在弹出的窗口中输入工程名,选择Finish。
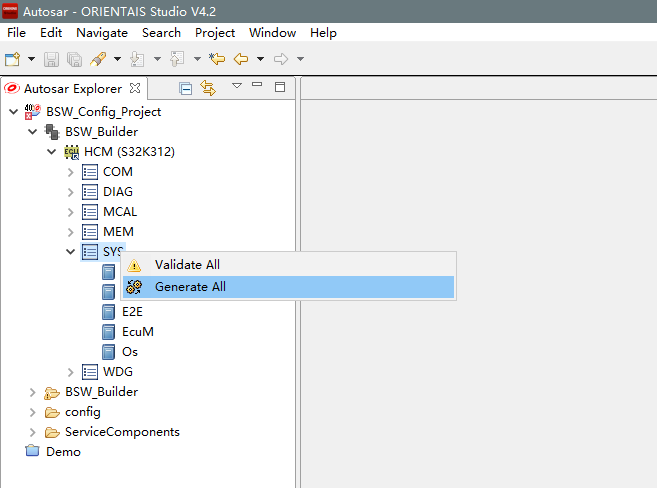
图 输入工程名
选择[Bsw_Builder],右键单击,选择New ECU Configuration。

图 新建ECU
在弹出的窗口中输入ECU名,然后选择Next。

图 选择MCU
在弹出的窗口中勾选需添加的模块,点击Finish。

图 选择模块
新建工程如下所示,步骤⑦中添加的模块已经被加入到工程中。

图 添加模块
模块配置及生产代码¶
模块配置¶
模块的具体配置,取决于具体的项目需求。
模块 |
参考文档 |
说明 |
|---|---|---|
Lin |
MCAL对应的Lin配置手册 |
|
LinIf |
参考手册LinIf.pdf |
|
Dcm |
参考手册Dcm.pdf |
|
PduR |
参考手册PduR.pdf |
|
Dem |
参考手册Dem.pdf |
配置代码生成¶
在ORIENTAIS Stuido主界面左方,选择对应的协议栈,单击右键弹出Validate All和Generate All菜单。

图 检验验证
选择Validate All对本协议栈各配置选项进行校验,没有错误提示信息即校验通过。若有错误信息,请按照错误提示修改。
选择Generate All,生成配置文件。右下角的Console窗口输出生成的配置文件信息。

图 生成配置文件
将ORIENTAIS Studio切换到Resource模式,即可查看生成的配置文件。

图 配置文件
发功能集成¶
代码集成¶
协议栈代码包括两部分:项目提供的协议栈源码和ORIENTAIS Studio配置生成代码。
用户须将协议栈源码和章节(配置代码生成)生成的源代码添加到集成开发工具的对应文件夹。协议栈集成的文件结构,见章节(源代码集成)。
Note
协议栈集成之前,用户须确保已经有基础工程,且本协议栈相关的其他协议栈能正常工作。
集成注意事项¶
对于集成过程中,协议栈特殊要求和用户经常出现的问题,归类总结形成 表 协议栈集成约束清单。用户需逐一排查表中的约束项,以避免集成问题出现。
编号 |
类别 |
约束限制 |
|---|---|---|
1 |
中断 |
通信栈有中断、轮询或混合三种工作模式。若选取中断或混合模式,用户需在OS配置对应的中断并填充中断服务API。 |
2 |
堆栈 |
用户需确保为任务堆栈和中断堆栈分配足够的堆栈空间。 |
3 |
头文件 |
|
4 |
初始化 |
UDSonLIN的初始化顺序为:Lin_Init, LinIf_Init, PduR_Init, LinTp_Init,Dcm _Init,Dem_PreInit, Dem_Init。 |
5 |
周期函数 |
Dcm_MainFunction,Dem_MainFunction和LinIf_MainFunction需要被周期性任务函数调用。 |
集成示例¶
本章节通过普通的LIN诊断栈为例,向用户展示LIN诊断栈的集成过程。用户可以据此熟悉LIN诊断栈配置工具的配置过程,以及如何应用配置工具生成的配置文件。
为让用户更清晰的了解工具的使用,所用的配置均逐一手动完成。工具有配置文件(arxml文件)生成和导入功能,如果有配置好的arxml文件,用户可以使用工具中的arxml文件导入功能,快速完成配置。
Note
本示例不代表用户的实际配置情况,用户需要根据自己的实际需求,决定各个参数的配置。
集成目标
集成后的工程为从节点LIN,集成完成后的工程可以进行诊断服务
信号设置如下表所示:
帧名称 |
帧类型 |
ID |
Tx\Rx |
节点地址 |
|---|---|---|---|---|
LinIfFrame_MasterReq |
诊断帧 |
0x3C |
RX |
物理地址:0x0A 功能地址:0x7e |
LinIfFrame_SlaveResp |
诊断帧 |
0x3D |
TX |
物理地址:0x0A |
模块的配置¶
新建配置工程及模块加载操作,请参考本文档章节(模块配置及生产代码)。
Lin模块配置¶
配置诊断协议栈之前需要使用 MCAL 工具配置 Lin 模块,但是只涉及到与诊断栈中报文收发有关系的部分(主要是 HardwareObeject)。该集成示例为从节点LIN,需要将LIN配置为从节点。具体配置选项请参考 MCAL工具的参考手册进行配置。
EcuC模块配置¶
双击EcuC模块,打开EcuC模块配置界面。

图 EcuC配置
在EcucConfigSets栏目上右键,选择EcucConfigSet。再在EcucConfigSet上右键,选择New🡪EcucPduCollection。

图 EcucConfigSet
·PduLengthTypeEnum 选择UINT16(这个参数是定义存储数据长度时使用的变量的长度,示例选择UINT16,若配置的报文长度都是8,不会超过255,选择UINT8即可)
在EcucPduCollection上右键,选择Pdu,会生成一个Pdu的配置界面。

图 新建Pdu
这里按照发送和接收,可以将Pdu名字改为报文的名字。LIN诊断需要配置6个Pdu,分别用于LinTp、Dcm。
图 配置Pdu
为每个 Pdu 配置 Length(根据项目不同配置不同的 Pdu 长度)。


图 配置Pdu的Length
Note
Dcm Pdu 长度必须与/Dcm/DcmConfigSet/DcmDsl/DcmDslBuffer 里面配置的 Dcm Tx、RxBuffer长度一致。
LinIf模块配置¶
双击LinIf模块,打开LinIf模块的配置界面。

图 LinIf配置
LinIfGeneral标签页使能LinIfTpSupported选项。
在LinIfGlobalConfig标签页下依次打开LinIfGlobalConfigs ->LinIfGlobalConfig ->LinIfChannel_1->LinIfFrames新建LinFrame用于诊断请求。
图 新建LinFrame
然后右击LinIfChannel_1新建LinFrame用于诊断响应。

图 新建响应报文
双击LinTp模块,进入LinTp配置页面,LinTpGeneral配置界面不需要配置
图 LinTpGeneral配置界面
选择LinTpGlobalConfig标签,LinTpGlobalConfig->LinTpChannelConfigs新建一个LinTpChannelConfig。再关联对应的ComMChannel。
图 关联Channel
选择LinTpRxNSdus新建物理地址的Sdu,根据需求配置对应的Ncr,NAD关联对应的ComMChannel

图 新建物理地址Sdu
选择LinTpRxNSdus新建功能地址的Sdu,根据需求配置对应的Ncr,NAD关联对应的ComMChannel。
图 新建功能地址Sdu
选择LinTpTxNSdus新建响应的Sdu,根据需求配置对应的Nas,Ncs,NAD,关联对应的LinChannel和ComMChannel。

图 新建响应Sdu
PduR模块配置¶
双击PduR模块,打开PduR模块的配置界面。在PduRBswModules中添加Dcm和LinTp。

图 PduR模块配置
打开PduRRoutingTables标签页,添加3个PduRRoutingPath。

图 添加PduRRoutingPath
配置诊断功能寻址请求(FuncReq)、物理寻址请求(PhysReq)、响应(Resp)的路由路径。诊断请求的PduRRoutingPath的PduRSrcPdu选择LinTp对应的PDU,PduRDestPDU选择Dcm对应的PDU。诊断响应的PduRRoutingPath的则相反。

图 配置物理寻址路由

图 配置功能寻址路由

图 配置响应路由
Dcm模块配置¶
Dcm模块配置可参考《集成手册_UDSonLIN.pdf》中Dcm的配置,Lin的诊断配置只需修改DcmDsl模块:
添加对应的Lin诊断的buffer:

图 DCM配置-DCMConfigSets
添加DcmDslProtocol:

图 DCM配置-DCMConfigSets
Dem模块配置¶
请参考《集成手册_UDSonLIN.pdf》中的Dem配置。
BswM模块配置¶
请参考《集成手册_UDSonLIN.pdf》中的BswM配置。
源代码集成¶
诊断栈源代码集成步骤如下:
在 MCAL 工程的基础上,同步章添加的 Lin 模块配置文件。
从基线中取出章(代码集成)中相关的源代码添加到工程中。
将在章(模块配置)中 ORIENTAS 配置生成的诊断相关配置文件添加到工程中。
添加相关头文件目录。
协议栈调度集成¶
诊断栈调度集成步骤如下:
诊断栈调度集成,需要逐一排查并实现表 诊断栈集成约束清单所罗列的问题,以避免集成出现差错。
编译链接代码,将生成的elf文件烧写进芯片。
使用iRte集成¶
请参考《集成手册_UDSonLIN.pdf》中的使用iRte集成。
使用Rte集成¶
请参考《集成手册_UDSonLIN.pdf》中的使用Rte集成。
验证结果¶
根据集成目标,共配置了3个报文,其中2个接收报文分别为诊断物理寻址及诊断功能寻址,1个发送报文为诊断响应。
图 验证结果
